







LiDAR360MLS
LiDAR360MLS je napredna softverska platforma dizajnirana za obradu i analizu podataka dobivenih mobilnim LiDAR sustavima (MLS – Mobile Laser Scanning). Njegova glavna funkcija je pretvaranje velikih i kompleksnih skupova 3D point cloud podataka u strukturirane, razumljive i praktično primjenjive informacije. Softver podržava rad s podacima prikupljenim putem vozila, ruksaka ili ručnih skenera, što ga čini izuzetno fleksibilnim za različite scenarije terenskog snimanja.
Jedna od ključnih prednosti LiDAR360MLS-a je integracija umjetne inteligencije koja omogućuje automatiziranu klasifikaciju i ekstrakciju objekata iz point cloud podataka. Sustav može automatski prepoznati i izdvojiti elemente poput prometnih traka, prometnih znakova, stupova, vegetacije i drugih infrastrukturnih objekata. Ova razina automatizacije značajno smanjuje potrebu za ručnim radom i ubrzava cijeli proces obrade podataka.
Softver nudi kompletan procesni lanac – od uvoza i obrade sirovih podataka, preko analize i modeliranja, do izvoza rezultata spremnih za korištenje u GIS, CAD i simulacijskim sustavima. Posebno je koristan u izradi visoko detaljnih (HD) karata, analizi cesta i infrastrukture te upravljanju imovinom u urbanim sredinama.
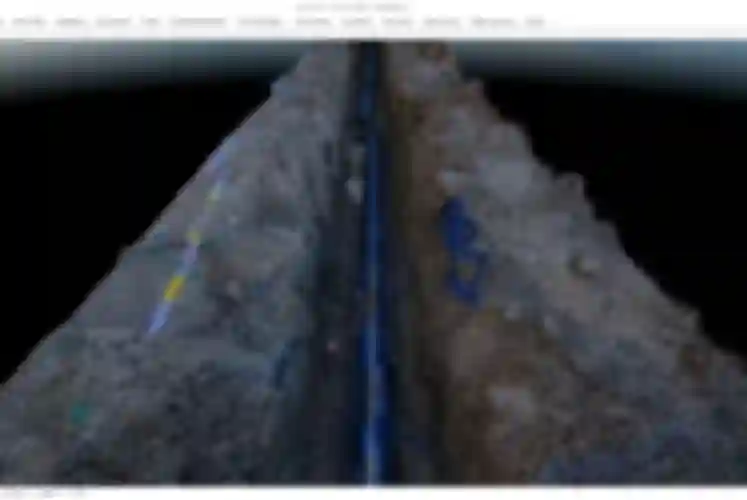
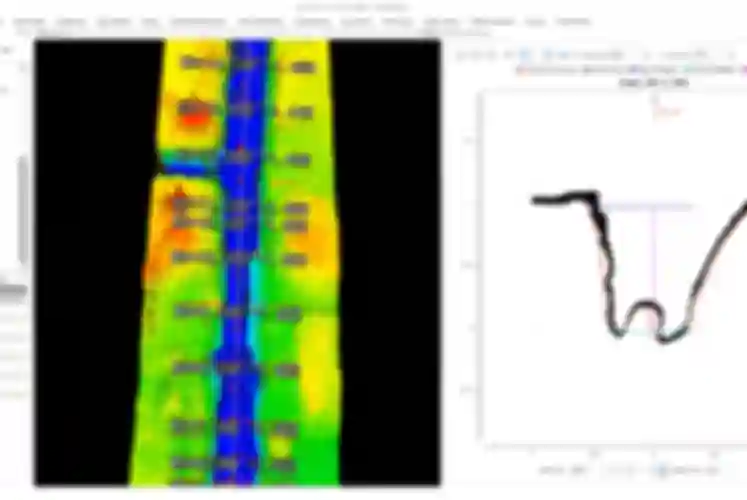
LiDAR360MLS također omogućuje napredne analize poput detekcije oštećenja kolnika, usporedbe podataka kroz različita vremenska razdoblja i generiranja standardiziranih izvještaja. Podržava 2D i 3D prikaze, rad u više perspektiva te precizno uređivanje vektorskih podataka, što dodatno povećava njegovu primjenjivost u inženjerskim i geodetskim projektima.
Zahvaljujući velikom broju alata i visokoj razini automatizacije, LiDAR360MLS značajno povećava produktivnost i točnost u projektima digitalnog mapiranja, urbanog planiranja i infrastrukture. Njegova sposobnost pretvaranja sirovih LiDAR podataka u gotove analitičke rezultate čini ga jednim od ključnih alata za modernu 3D geoinformacijsku obradu.
Tehničke specifikacije
- Tip softvera: MLS (Mobile Laser Scanning) obrada point cloud podataka
- Podržani izvori: vozila, backpack i handheld LiDAR sustavi
- AI funkcije:
- automatska klasifikacija i ekstrakcija objekata
- detekcija cestovnih elemenata i infrastrukture
- Funkcionalnosti:
- 3D ekstrakcija značajki
- vektorizacija i izrada HD mapa
- analiza cesta i infrastrukture
- Integracije: GIS, CAD i simulacijski sustavi
- Analize:
- detekcija oštećenja cesta
- usporedba višefaznih podataka
- generiranje izvještaja
- Hardverski zahtjevi:
- CPU: Intel i5/i7
- RAM: ≥ 8 GB
- GPU: NVIDIA (≥2 GB VRAM preporučeno)
- OS: Windows 7–11 / Server